Dokumentacja techniczna robot autonomiczny
Технічна документація Автономний робот
- Opis
- Lista elementów
- Schematy
- Opis Montażu
1. Opis
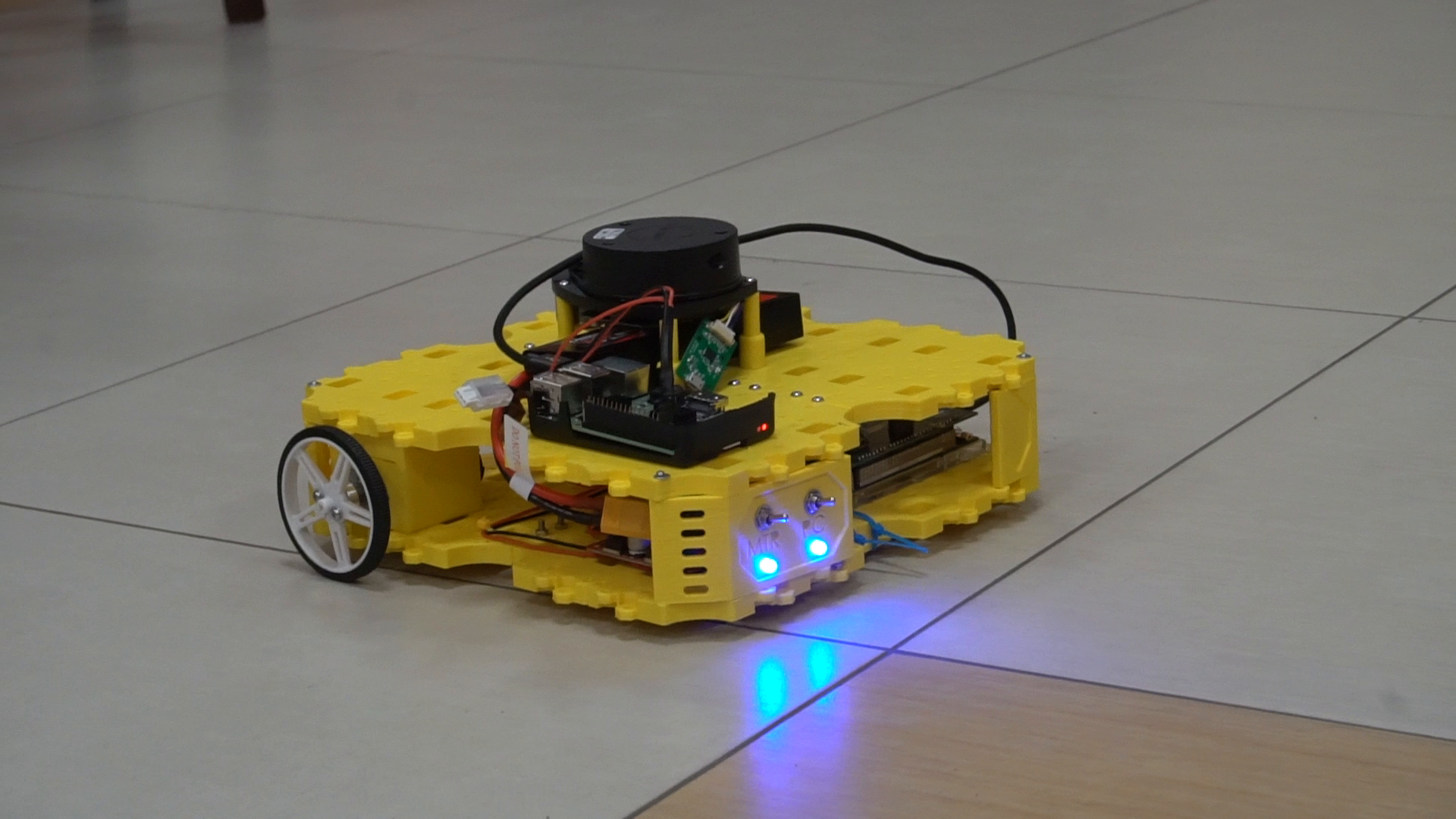
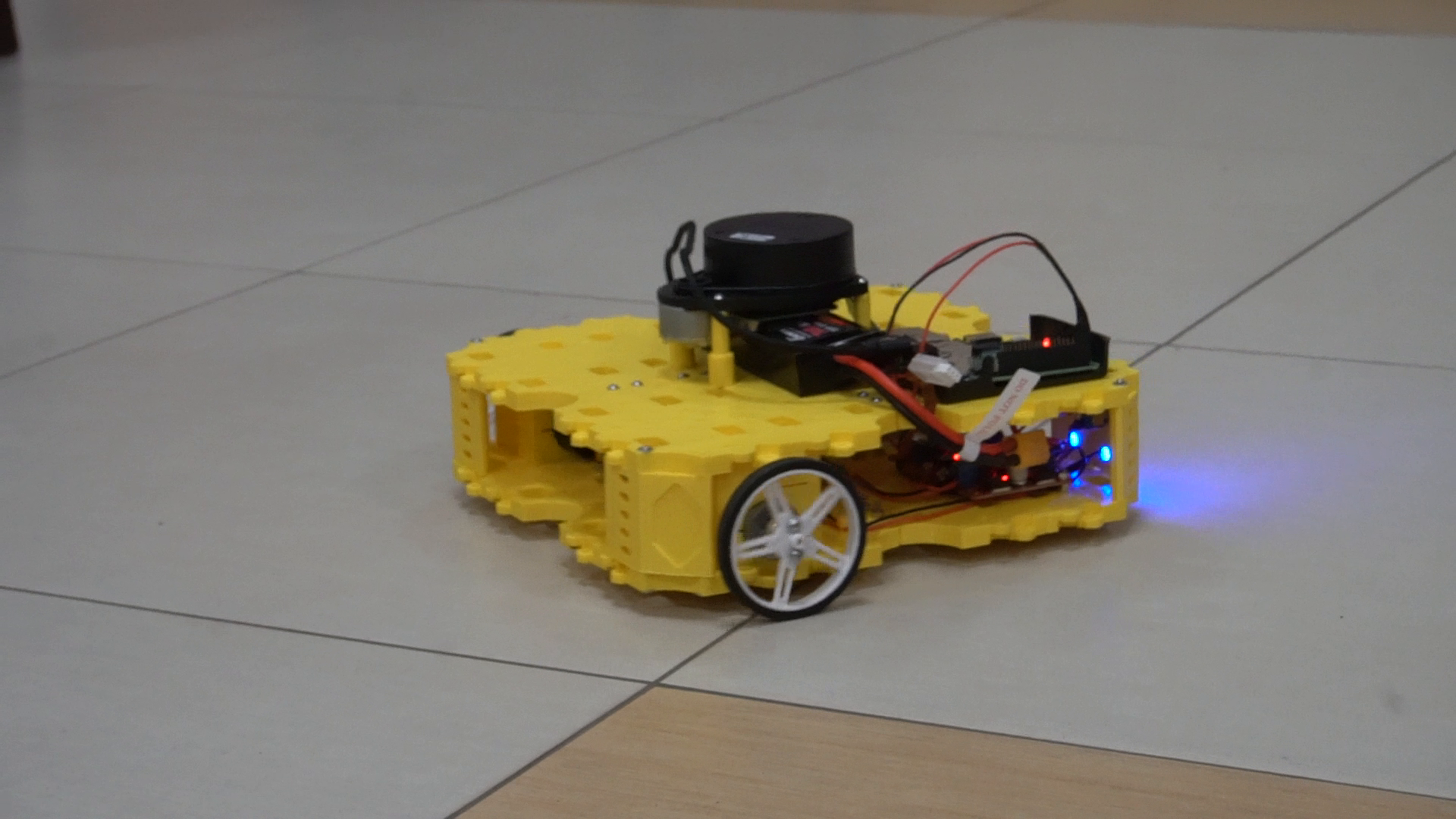
Robot autonomiczny posiada masę około 1.5kg, wyposażony jest w skaner laserowy LIDAR, który obsługiwany jest przez komputer SBC Raspberry Pi. Informacje pozyskane ze skanera wykorzystywane są do określenia położenia robota w przestrzeni oraz wykrywania przeszkód do ominięcia.
Sterowanie odbywa się poprzez komputer z systemem Ubuntu Mate, można używać klawiatury jak i podłączyć kontroler bluetooth. Raspbery nadaje informacje do komputera, komputer dokonuje stosownych obliczeń, po czym wysyła informacje na temat obrotu kół. Obrót koła zmienia pozycję robota w przestrzeni, obliczenia dla zmiany pozycji nazywa się odometrią. Przeliczanie jej jest możliwe, ponieważ znany jest obrót koła dzięki zamontowanym enkoderom.
Informacje na temat obrotu kół przekazywane są do Arduino, które zajmuje się ich interpretacją i przetworzeniem na napęd silnika.
2. Lista elementów
Elementy do budowy robota autonomicznego:
- Akumulator Li-Pol 2S2P 5000mAh
- 2x Silnik DC z enkoderem Pololu
- RaspberryPi 3B+
- LIDAR RpLidar A1M8
- 2x przetwornica StepUp/Down
- Przewody z izolacją silikonową 22AWG
- Arduino Due
- Arduino Due protoshield
- 2x listwy GoldPin pojedyncze
- gniazda waflowe
- 2x dioda LED
- 2x rezystor 220Ohm
- 2x przełącznik dźwigienkowy
- sterownik silników L293
- złącza WAGO do druku
- inserty M2 oraz M3
- koła 70mm
- przedłużka do baterii
- 2kg filamentu PLA
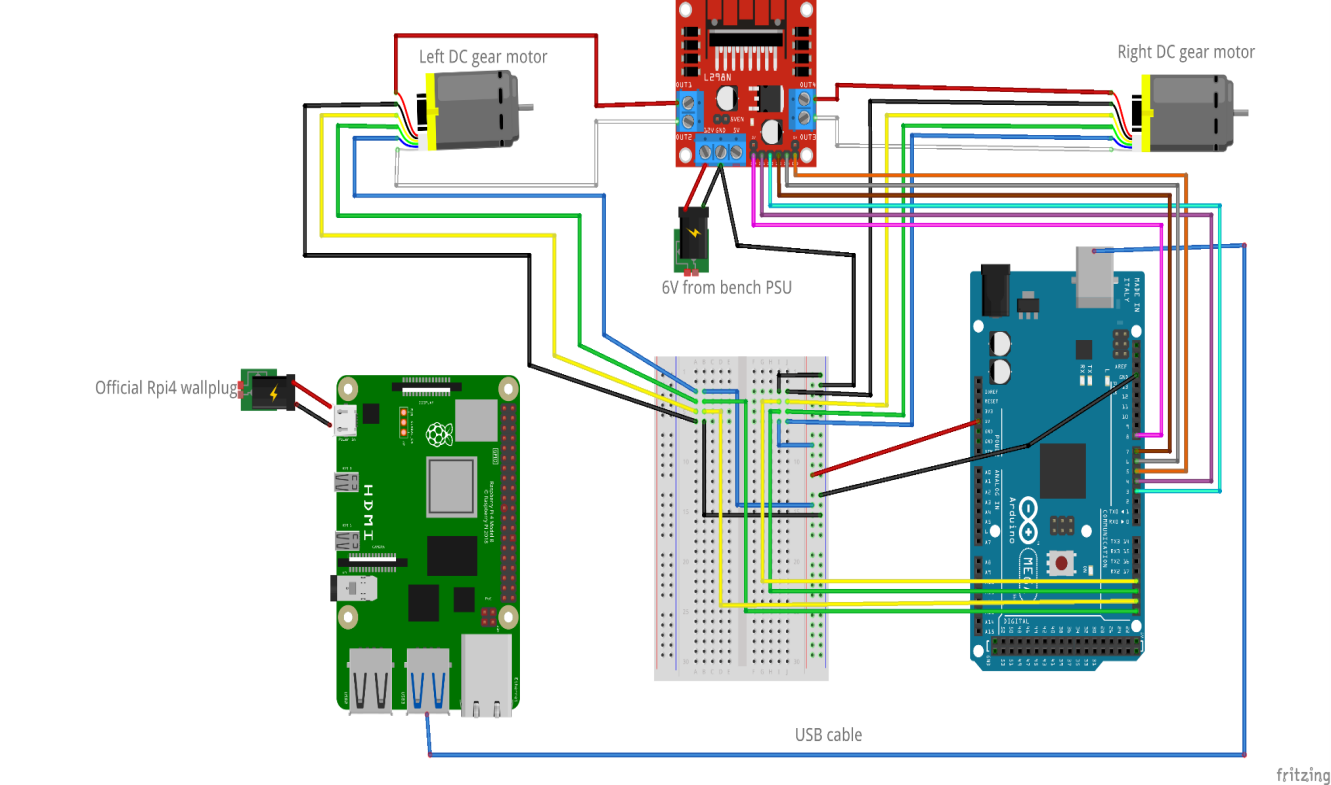
3. Schematy
Schemat połączeń Arduino dla robota autonomicznego
4. Opis Montażu
Zmontuj ramę wydrukowaną zgodnie z rysunkami złożeniowymi, zalecane jest użycie śrub M3 do mocowania elektroniki, tam gdzie będzie to potrzebne, wtapia się inserty.
- Zamocuj dwie przetwornice
- Zamocuj włączniki oraz diody wskaźnikowe
- Zamocuj silniki w blokach silnikowych
- Zamocuj bloki w przeznaczone miejsca na płycie dolnej
- Zmontuj Protoshield zgodnie ze schematem
- Przylutuj przewód baterii do wyłączników oraz diod
- Poprowadź przewody od przełączników do przetwornic
- Wyreguluj napięcie zasilania na przetwornicach do wartości 5V
- Poprowadź przewody z przetwornicy MTR do Arduino
- Poprawadź przewody z przetwornicy PC do Raspberry Pi
- Zamocuj Raspberry Pi na górnej płycie
- Zamocuj Lidar na górnej płycie
- Podłącz Lidar do portu USB Raspberry
- Podłącz Arduino do portu USB Raspberry
- Wgraj do Arduino program Serial_Bridge ROS2
- Zainstaluj na Raspberry Pi system Ubuntu oraz system ROS Foxy
- Sprawdź komunikację między komputerem a Raspberry Pi
- Sprawdź działanie przykładowych programów w symulatorze
- Sprawdź działanie przykładowych programów na robocie
Технічна документація Автономний робот
1.Опис
2.Перелік компонентів
3.Схеми
4.Опис збірки
- Опис
Автономний робот має масу приблизно 1,5 кг і оснащений лазерним сканером LIDAR, який управляється комп’ютером SBC Raspberry Pi. Інформація, отримана зі сканера, використовується для визначення положення робота в просторі та виявлення перешкод, яких слід уникати.
Керування здійснюється через комп’ютер під управлінням Ubuntu Mate, можна використовувати клавіатуру, а також підключити Bluetooth-контролер. Raspbery передає інформацію на комп’ютер, комп’ютер робить відповідні розрахунки, а потім надсилає інформацію про обертання коліс. Обертання колеса змінює положення робота в просторі, розрахунок зміни положення називається одометрією. Цей розрахунок можливий, оскільки обертання колеса відоме завдяки встановленим датчикам.
Інформація про обертання колеса передається до Arduino, який дбає про її інтерпретацію та перетворення в привід двигуна.
2. Перелік компонентів
Компоненти для побудови автономного робота:
- Li-Pol 2S2P 5000mAh акумуляторна батарея
- 2x двигун постійного струму з енкодером Pololu
- RaspberryPi 3B+
- RpLidar A1M8 LIDAR
- 2x StepUp / Down перетворювач
- Провід з силіконовою ізоляцією 22AWG
- Arduino Due
- Протошифт Arduino Due
- 2x одинарні смужки GoldPin
- гнізда для пластин
- 2x світлодіод
- 2x резистор 220 Ом
- 2x перемикач
- Контролер двигуна L293
- Роз’єми для друку WAGO
- Вставки M2 і M3
- колеса 70мм
- – подовжувач акумулятора
- – 2 кг нитки PLA
- Схеми
Схема підключення Arduino для автономного робота.
4.опис збірки
Зберіть друковану рамку відповідно до складальних креслень, рекомендується використовувати гвинти М3 для кріплення електроніки, вставити вставки там, де це необхідно.
- Закріпіть два інвертори
- Закріпіть перемикачі та індикаторні лампи
- Закріпіть двигуни в моторних блоках
- Закріпіть блоки в призначених для цього місцях на опорній плиті.
- Зберіть Protoshield відповідно до схеми
- Припаяйте кабель акумулятора до вимикачів та діодів
- Підключіть дроти від перемикачів до інверторів
- Відрегулюйте напругу живлення на інверторах до 5В
- Підключіть дроти від МТР до Arduino.
- Прокладіть дроти від інвертора до комп’ютера до Raspberry Pi
- Закріпіть Raspberry Pi на верхній платі
- Встановіть Lidar на верхню плату
- Підключіть лідар до USB-порту на Raspberry
- Підключіть Arduino до USB-порту на Raspberry
- Завантажте програму Serial_Bridge ROS2 на Arduino.
- Встановіть Ubuntu та ROS Foxy на Raspberry Pi.
- Перевірте зв’язок між комп’ютером та Raspberry Pi
- Протестувати роботу прикладів програм в симуляторі
- Перевірити роботу прикладів програм на роботі
-
- Schemat
-
- robot
-
- Robot